Hello! Eventually we meet after one month passed… I thought about how to recognize weed in try&error manner. Anyway I’ll restart blog post.
Currently developed crab-like weed robot has a camera having 5mega pixel resolution. This camera is connected to Raspberry Pi Zero WH via CSI. At first I’ll describe overall process how to discriminate weed from captured image(Here I’ll not describe how to estimate distance from robot to weed).
- Select rectangular area dominant for green from captured image.
- Calculate super pixel in selected area and then select a segment dominant for green again. Other segments are set to black.
- Discriminate if selected segment contains leaf vein using cascade classifier.
For 1. we can discriminate in terms of RGB histogram (number of bin is 16)for rectangular area and relative peak for green is located at more right-hand side than blue and red. For 2. I used super pixel function implemented in OpenCV. And the process whether selected area is dominant for green or not is same as 1. For 3. I used cascade classifier deployed in OpenCV. Thanks for OpenCV developers!
How to select target area dominant for green
The following photo was taken at my native place via my smart phone. The size of original image is 1108 x 1478 pixel and resized it 1/4. Raspberry Pi Zero WH has only limited hardware resource and there are some additional tasks to be run in it so that I need to get small size images.

I split this image into 4 subareas(upper left,upper right,lower left, lower right)and select one area dominant for green. The selected area is shown below(eventually lower left area is selected).

Super pixel calculation
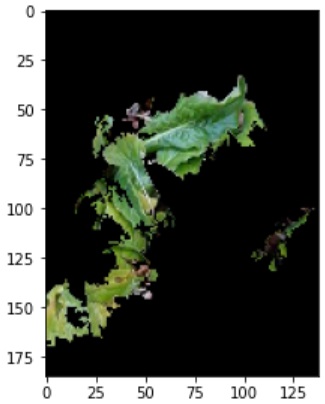
The following image was extracted after super pixel is calculated and other segments not dominant for green are set to black. We can see black area in spite of weed leaf. This causes from severe criteria to discriminate whether target areas contain weed or not.
Cascade Classifier
Next we need to discriminate whether selected segment contains leaf vein or not using cascade classifier. I prepared for 700 sample images for both positive and negative. The following image is one of positive sample.

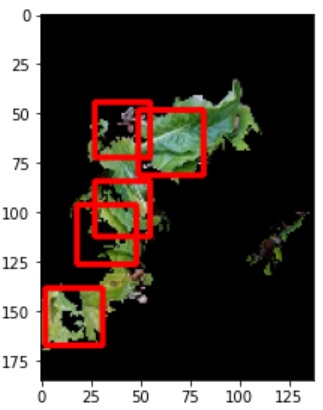
Next image shows selected segment with super imposed ROI (red rectangle) using learned classifier. For initial test, I could see many false-positive cases. However I got successful result after I used super pixel to focus on target segment dominant for green.
How do you feel about the above result? Anyway there were many try&errors to get final results. Next step is to describe how to detect weed in real time using a camera mounted on the robot.