After the robot recognizes weed, we need to estimate distance to it. As I mentioned in another post, the robot has only single camera. If the robot has more one camera, we can estimate the distance to weed by disparity. But we need to search for another approach. The process how to estimate the distance to weed is shown below.
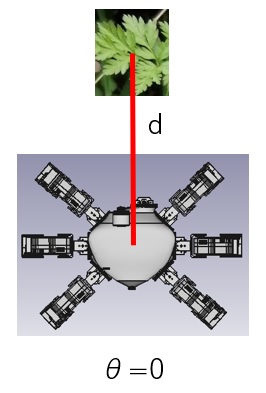
- Currently we can estimate the absolute distance to weed by rotating the robot along with vertical axis to the ground.
- When the robot recognizes weed, weed is located in front of the robot. After the robot rotates along with vertical axis to the ground, we can estimate the relative distance to weed by calculating the position in image.
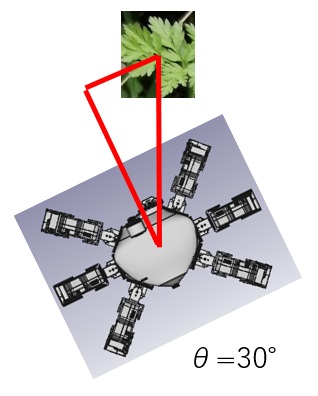
- Here d is the distance to weed from robot and θ is rotational angle.
- When robot rotates θ, we measure the position of identical weed in before/after images and the distance from robot to weed. Then we derive the relationship among d,θ,P(x,y). Once we can get the relationship among d,θ,P(x,y), we can estimate the absolute distance from robot to weed.
- The key points for this process are how to derive the relationship among d,θ,P(x,y) and recognize identical weed in before and after images. In the latter case, we can compare both images by applying Gabor filter bank to calculate feature vectors and then select a window having minimum distance from before image to that of after.